坐标转换
本文主要介绍ECEF(地心地固坐标)、LLA(经纬高;WGS-84坐标)、ENU(站心坐标;东北天坐标)。
坐标转换
GNSS全称是全球导航卫星系统(Global Navigation Satellite System)
1 坐标分类
1.1 ECEF坐标
地心地固坐标系(Earth-Centered,Earth-Fixed,简称ECEF)简称地心坐标系,是一种以地心为原点的地固坐标系(也称地球坐标系),是一种笛卡儿坐标系。原点 O (0,0,0)为地球质心,z 轴与地轴平行指向北极点,x 轴指向本初子午线与赤道的交点,y 轴垂直于xOz平面(即东经90度与赤道的交点)构成右手坐标系。
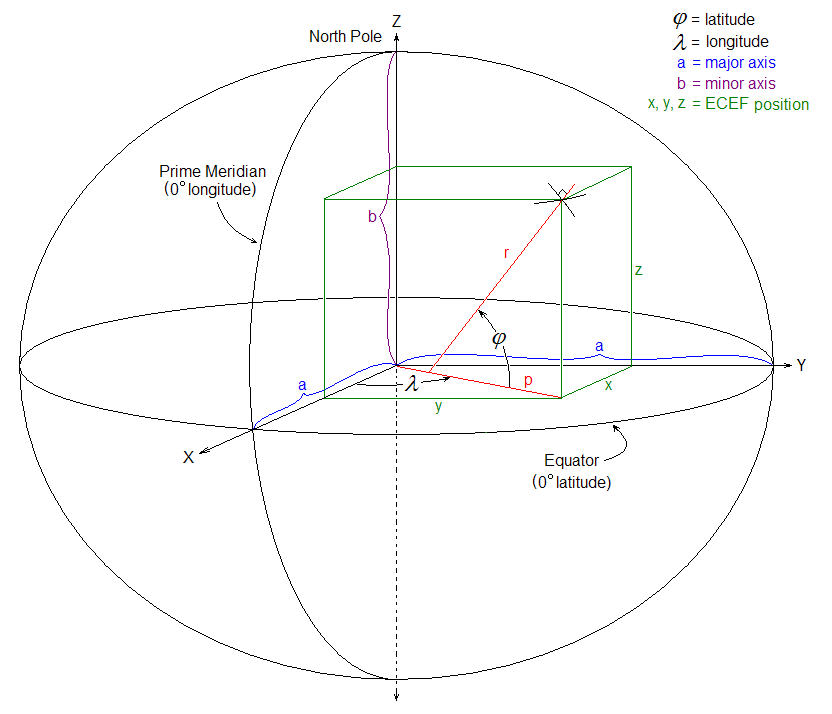
ECEF坐标系有以下参数:
- 所选椭球中心的原点
- Z 轴是北极和南极之间的线,正值向北增加
- X轴在赤道平面内,经过原点,从经度180°(负)延伸到本初子午线到经度180°(正)
- Y 轴也在赤道平面内,穿过从西经 90°(负)到东经 90°(正)
1.2 LLA坐标
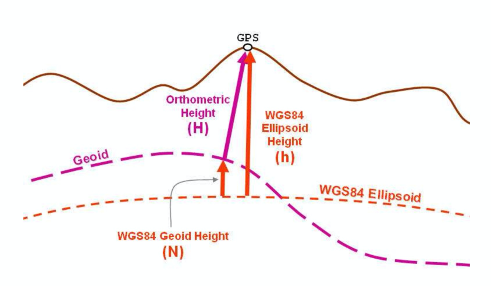
地理坐标系则通过经度(longitude),纬度(latitude)和高度(altitude)来表示地球的位置,也叫经纬高坐标系(LLA坐标系)。
世界大地测量系统(英语:World Geodetic System, WGS)是一种用于地图学、大地测量学和导航(包括全球定位系统)的大地测量系统标准。WGS包含一套地球的标准经纬坐标系、一个用于计算原始海拔数据的参考椭球体,和一套用以定义海平面高度的引力等势面数据。
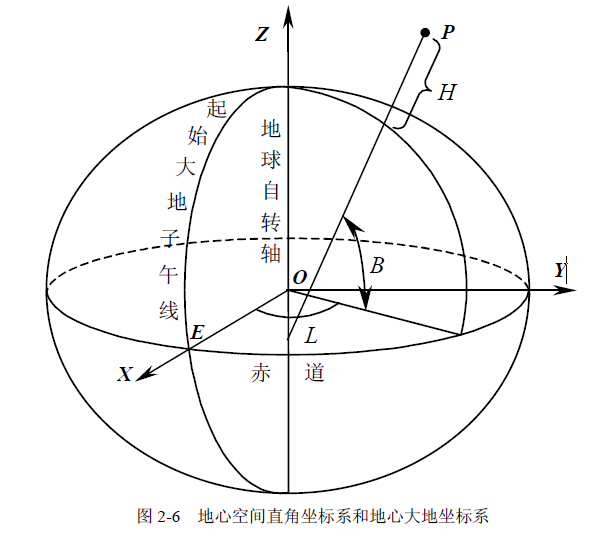
- h:从点到基准椭球面的法线距离,即大地高度,外正内负;
- H:点到大地水准面的法线距离,海拔高度;
- $N_{h}$ :大地水准面高度,即大地水准面高出基准椭球面的法线距离,它在全球各地区的值可由相关资料查得;
由于地球是个椭球体,可以看出在低纬度地区,0°纬线之间的距离差和1°高纬度地区的纬线距离差是不同的,数值大概都在 111km 左右。1°经线的差异会随着维度不同而不同,可以想象高维度地区越靠近极点,1°经线差异越接近 0km。
| 参数 | WGS-84 | CGC200 |
|---|---|---|
| 基准椭球体的长半径a | 6378137.0 m | 6378137.0 m |
| 基准椭球体的极扁率f | 1/298.257223565 | 1/298.257223563 |
| 地球自转角速度We | 7.2921151467*1e-5 | 7.2921151467*1e-5 |
| 地球引力和地球质量的乘积GM | 3986004.418*1e8 | 3986004.418*1e8 |
| 光速 | 2.99792458*1e8 m/s | 2.99792458*1e8 m/s |
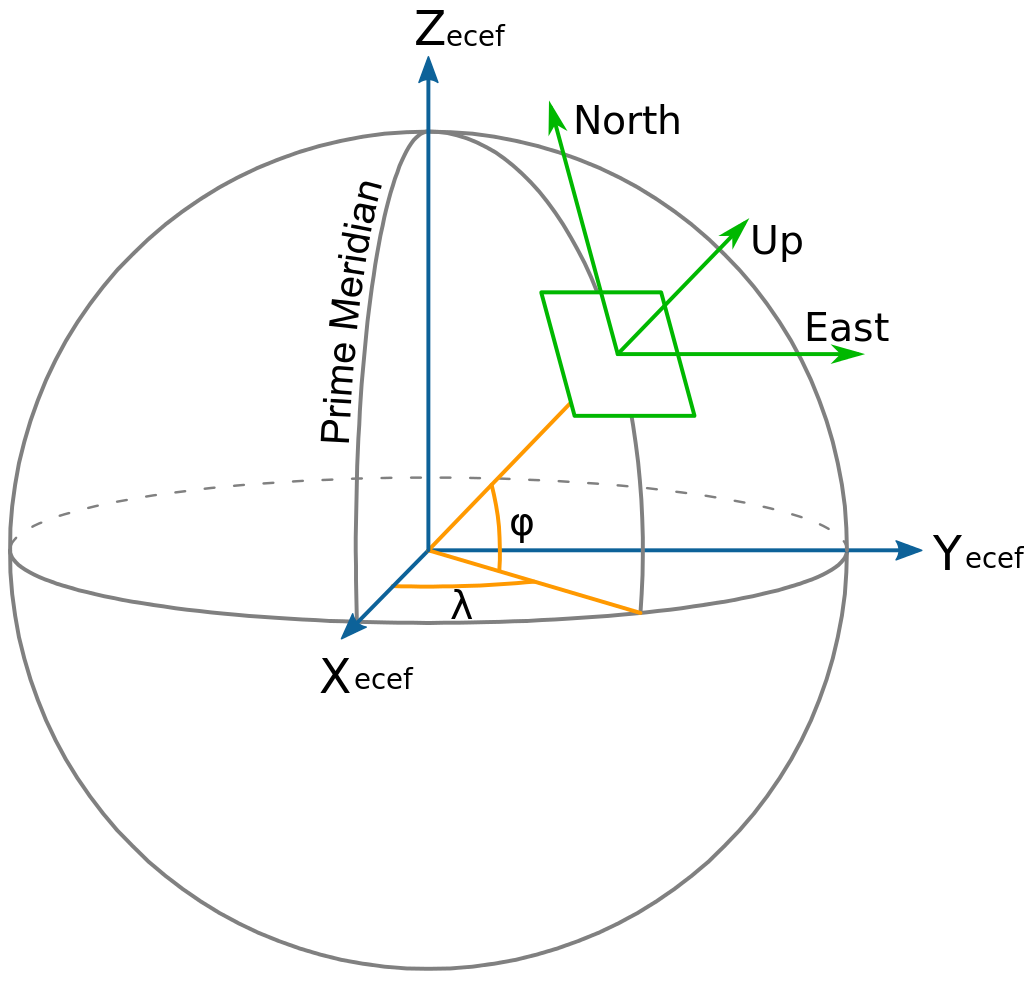
1.3 ENU坐标
站心地平直角坐标系(East North Up, ENU)是定义在地表正切平面的局部坐标系。如下图所示,它以站心点的纬线方向(指东)为X轴,以站心点的经线方向(指北)为Y轴,以站心点的法线(指上)为Z轴。站心坐标系以用户所在位置P为坐标原点,三个轴分别指向东向,北向和天向,也叫东北天坐标系(ENU坐标系)。
2 坐标转换
2.1 LLA转ECEF
LLA坐标系下的 (lon,lat,alt) 转换为ECEF坐标系下点 (X,Y,Z)。
其中e为椭球偏心率,N为基准椭球体的曲率半径。
\[\begin{cases} e^{2} &=& \frac{a^{2}-b^{2}}{a^{2}} \\ N &=& \frac{a}{1- e^{2}\sin^{2}(alt)} \end{cases}\]由于WGS-84下极扁率 $f=\frac{a−b}{a}$, 偏心率 e 和极扁率 f 之间的关系。
\[\begin{aligned} e^{2} = f(2-f) \end{aligned}\]坐标转换公式也可以为。
\[\begin{aligned} & \begin{cases} X &=& (N+alt)\cos(lat)\cos(lon) \\ Y &=& (N+alt)\cos(lat)\sin(lon) \\ Z &=& (N(1-e^{2})+alt)sin(alt) \end{cases} \\ & N = \frac{a}{\sqrt{1-f(2-f)\sin^{2}(lat)}} \end{aligned}\]2.2 ECEF转LLA
LLA坐标系下的 (lon,lat,alt) 转换为ECEF坐标系下点 (X,Y,Z)。
一开始 lat 是未知的,可以假设为0,经过几次迭代之后就能收敛。
2.3 ECEF转ENU
用户所在坐标点 P0=(x0,y0,z0),计算点 P=(x,y,z) 在以点 P0 为坐标原点的enu坐标系位置 (e,n,u) ,这里需要用到 LLA 坐标系的数据,P0的LLA坐标点为 LLA0=(lon0,lat0,alt0)。
即坐标变换矩阵。
\[S = \left[ \begin{matrix} -\sin(lon_{0}) & \cos(lon_{0}) & 0 \\ -\sin(lon_{0})\cos(lon_{0}) & -\sin(lat_{0})\sin(lon_{0}) & \cos(lat_{0}) \\ \cos(lat_{0})\cos(lon_{0}) & cos(lat_{0})sin(lon_{0}) & \sin(lat_{0}) \\ \end{matrix} \right]\]2.4 ENU转ECEF
S为单位正交矩阵
\[S^{-1} = S^{T}\]反之
\[\left[ \begin{matrix} \Delta x \\ \Delta y \\ \Delta z \\ \end{matrix} \right] = S^{-1} \cdot \left[ \begin{matrix} e \\ n \\ u \\ \end{matrix} \right] = S^{T} \left[ \begin{matrix} e \\ n \\ u \\ \end{matrix} \right]\]2.5 LLA转ENU
上述可以看到,从 LLA 坐标系转换到 enu 坐标系有较多计算量,在考虑地球偏心率 e 很小的前提下,可以做一定的近似公式计算
3 示例代码
3.1 ECEF与LLA
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
#include <iostream>
#include <math.h>
#define M_PI (3.14159265358979323846) /* PI */
#define RAD (57.3248407643312) /* 1 rad = 57.32° */
#define DEG2RAD(val) (val / RAD) /* 角度转弧度 */
#define RAD2DEG(val) (val * RAD) /* 弧度转角度 */
#define WGS84_A (6378137.0) /* 基准椭球体的长半径a */
#define WGS84_F (1 / 298.257223565) /* 基准椭球体的极扁率f */
#define WGS84_B ((1 - WGS84_F) * WGS84_A) /* 基准椭球体的长半径b */
#define EPSILON (0.000000000000001) /* 误差 */
class Coordinate
{
public:
Coordinate();
~Coordinate();
/**
* @brief LLA(WGS84)转ECEF
* @param lat 纬度,单位度,范围-90~90.
* @param lon 经度,单位度,范围-180~180.
* @param alt 高度,单位米.
* @param x 坐标x,单位米.
* @param y 坐标y,单位米.
* @param z 坐标z,单位米.
*/
static void LLA2ECEF(double lat, double lon, double alt,
double& x, double& y, double& z);
/**
* @brief ECEF转LLA(WGS84)
* @param x 坐标x,单位米.
* @param y 坐标y,单位米.
* @param z 坐标z,单位米.
* @param lat 纬度,单位度,范围-90~90.
* @param lon 经度,单位度,范围-180~180.
* @param alt 高度,单位米.
*/
static void ECEF2LLA(double x, double y, double z,
double& lat, double& lon, double& alt);
};
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
#include "Coordinate.h"
Coordinate::Coordinate()
{
}
Coordinate::~Coordinate()
{
}
void Coordinate::LLA2ECEF(double lat, double lon, double alt, double& x, double& y, double& z)
{
double WGS84_E2 = WGS84_F * (2 - WGS84_F);
double latRad = DEG2RAD(lat);
double lonRad = DEG2RAD(lon);
double N = WGS84_A / (sqrt(1 - WGS84_E2 * sin(latRad) * sin(latRad)));
x = (N + alt) * cos(latRad) * cos(lonRad);
y = (N + alt) * cos(latRad) * sin(lonRad);
z = (N * (1 - WGS84_E2) + alt) * sin(latRad);
}
void Coordinate::ECEF2LLA(double x, double y, double z, double& lat, double& lon, double& alt)
{
double WGS84_E = sqrt(WGS84_A * WGS84_A - WGS84_B * WGS84_B) / WGS84_A;
double p = sqrt(x * x + y * y);
double N = 0.0;
double curLat = 0.0;
double calLat = atan2(z, p);
for (int i = 0; RAD2DEG(abs(calLat - curLat)) > EPSILON && i < 25; i++)
{
curLat = calLat;
N = WGS84_A / sqrt(1 - WGS84_E * WGS84_E * sin(curLat) * sin(curLat));
calLat = atan2(z + N * WGS84_E * WGS84_E * sin(curLat), p);
}
lat = RAD2DEG(atan2(y, x));
lon = RAD2DEG(calLat);
alt = z / sin(calLat) - N * (1 - WGS84_E * WGS84_E);
}
参考
[1] 参考ECEF与LLA相互转换代码
[2] 地心地固坐标系(ECEF)与站心坐标系(ENU)的转换
[3] wgs_conversions