算法图解
该文记录《算法图解》主要内容。
算法图解
1 算法简介
1.2 二分查找
仅当列表是有序的时候,二分查找才管用
1.2.2 运行时间
最多需要猜测的次数与列表长度相同,这被称为线性时间(linear time)。
二分查找的运行时间为对数时间(或log时间)
1.3 大O表示法
大O表示法指的并非以秒为单位的速度。大O表示法让你能够比较操作数,它指出了算法运行时间的增速。
1.3.4 一些常见的大O运行时间
- O(log n),也叫对数时间,这样的算法包括二分查找。
- O(n),也叫线性时间,这样的算法包括简单查找。
- O(n * log n),这样的算法包括第4章将介绍的快速排序——一种速度较快的排序算法。
- O($n^2$),这样的算法包括第2章将介绍的选择排序——一种速度较慢的排序算法。
- O(n!),这样的算法包括接下来将介绍的旅行商问题的解决方案——一种非常慢的算法。
1.4 小结
- 二分查找的速度比简单查找快得多。
- O(log n)比O(n)快。需要搜索的元素越多,前者比后者就快得越多。
- 算法运行时间并不以秒为单位。
- 算法运行时间是从其增速的角度度量的。
- 算法运行时间用大O表示法表示。
2 选择排序
2.2 数组和链表
2.2.1 链表
链表中的元素可存储在内存的任何地方。链表的每个元素都存储了下一个元素的地址,从而使一系列随机的内存地址串在一起。
缺点:读取必须依次顺序遍历。
2.2.2 数组
数组与知道其中每个元素的地址。
缺点:插入和删除需要移动后面元素。
2.2.3 术语
数组的元素带编号,编号从0而不是1开始。
元素的位置称为索引。
数组链表和链表数组。
2.4 小结
- 计算机内存犹如一大堆抽屉。
- 需要存储多个元素时,可使用数组或链表。
- 数组的元素都在一起。
- 链表的元素是分开的,其中每个元素都存储了下一个元素的地址。
- 数组的读取速度很快。
- 链表的插入和删除速度很快。
- 在同一个数组中,所有元素的类型都必须相同(都为int、double等)
3 递归
3.1 递归
递归——函数调用自己。
Leigh Caldwell 在 Stack Overflow 上说的一句话:“如果使用循环,程序的性能可能更高;如果使用递归,程序可能更容易理解。如何选择要看什么对你来说更重要。”
3.2 基线条件和递归条件
每个递归函数都有两部分:基线条件(base case)和递归条件(recursive case)
递归条件指的是函数调用自己,而基线条件则指的是函数不再调用自己,从而避免形成无限循环。
3.3 栈
压入(插入)和弹出(删除并读取),这种数据结构称为栈。
缺点:存储详尽的信息可能占用大量的内存。每个函数调用都要占用一定的内存,如果栈很高,就意味着计算机存储了大量函数调用的信息。在这种情况下,你有两种选择。
重新编写代码,转而使用循环。
使用尾递归。这
3.4 小结
- 递归指的是调用自己的函数。
- 每个递归函数都有两个条件:基线条件和递归条件。
- 栈有两种操作:压入和弹出。
- 所有函数调用都进入调用栈。
- 调用栈可能很长,这将占用大量的内存。
4 快速排序
分而治之(divide and conquer,D&C)——一种著名的递归式问题解决方法。
4.1 分而治之
使用D&C解决问题的过程包括两个步骤。
(1) 找出基线条件,这种条件必须尽可能简单。
(2) 不断将问题分解(或者说缩小规模),直到符合基线条件。
4.2 快速排序
(1) 选择基准值。
(2) 将数组分成两个子数组:小于基准值的元素和大于基准值的元素。
(3) 对这两个子数组进行快速排序(重复上述步骤)。
4.4 小结
- D&C将问题逐步分解。使用D&C处理列表时,基线条件很可能是空数组或只包含一个元 素的数组。
- 实现快速排序时,请随机地选择用作基准值的元素。快速排序的平均运行时间为O(n log n)。
- 大O表示法中的常量有时候事关重大,这就是快速排序比合并排序快的原因所在。
- 比较简单查找和二分查找时,常量几乎无关紧要,因为列表很长时,O(log n)的速度比O(n) 快得多。
5 散列表
5.1 散列函数
散列表可能是最有用的,也被称为散列映射、映射、字典和关联数组。散列表由键和值组成。
5.2 应用案例
5.2.1 将散列表用于查找
- 电话簿
- DNS解析(DNS resolution)
5.2.2 防止重复
- 投票
5.2.3 将散列表用于缓存
- 网站缓存
5.2.4 小结
散列表适合用于:
- 模拟映射关系;
- 防止重复;
- 缓存/记住数据,以免服务器再通过处理来生成它们。
5.3 冲突
冲突(collision):给两个键分配的位置相同。
5.4 性能
避免冲突,需要有:
- 较低的填装因子;
- 良好的散列函数。
5.4.1 填装因子
填装因子 = 散列表包含的元素数 / 位置总数
一旦填装因子开始增大,你就需要在散列表中添加位置,这被称为调整长度(resizing)。通常将数组增长一倍。
5.4.2 良好的散列函数
可将SHA函数用作散列函数。
5.5 小结
你几乎根本不用自己去实现散列表,因为你使用的编程语言提供了散列表实现。假定能够获得平均情况下的性能:常量时间。
- 你可以结合散列函数和数组来创建散列表。
- 冲突很糟糕,你应使用可以最大限度减少冲突的散列函数。
- 散列表的查找、插入和删除速度都非常快。
- 散列表适合用于模拟映射关系。
- 一旦填装因子超过0.7,就该调整散列表的长度。
- 散列表可用于缓存数据(例如,在Web服务器上)。
- 散列表非常适合用于防止重复。
6 广度优先搜索
广度优先搜索(breadth-first search,BFS)。广度优先搜索让你能够找出两样东西之间的最短距离。
6.1 图简介
解决最短路径问题的算法被称为广度优先搜索。
6.2 图是什么
图模拟一组连接。图由节点和边组成。一个节点可能与众多节点直接相连,这些节点被称为邻居。
6.3 广度优先搜索
6.3.1 查找最短路径
在广度优先搜索的执行过程中,搜索范围从起点开始逐渐向外延伸,即先检查一度关系,再检查二度关系。只有按添加顺序查找时,才能实现这样的目的。
6.3.2 队列
队列只支持两种操作:入队和出队。
队列是一种先进先出(First In First Out,FIFO)的数据结构,而栈是一种后进先出(Last In First Out,LIFO)的数据结构。
6.4 实现图
图由多个节点组成。
有向图(directed graph),其中的关系是单向的
无向图(undirected graph)没有箭头,直接相连的节点互为邻居。
6.5 实现算法
6.6 小结
- 广度优先搜索指出是否有从A到B的路径。
- 如果有,广度优先搜索将找出最短路径。
- 面临类似于寻找最短路径的问题时,可尝试使用图来建立模型,再使用广度优先搜索来解决问题。
- 有向图中的边为箭头,箭头的方向指定了关系的方向。
- 无向图中的边不带箭头,其中的关系是双向的。
- 队列是先进先出(FIFO)的。
- 栈是后进先出(LIFO)的。
- 必须顺序搜索列表,所以搜索列表必须是队列。
- 对于检查过的人,务必不要再去检查,否则可能导致无限循环。
7 狄克斯特拉算法
7.1 使用狄克斯特拉算法
狄克斯特拉算法(Dijkstra’s algorithm)。
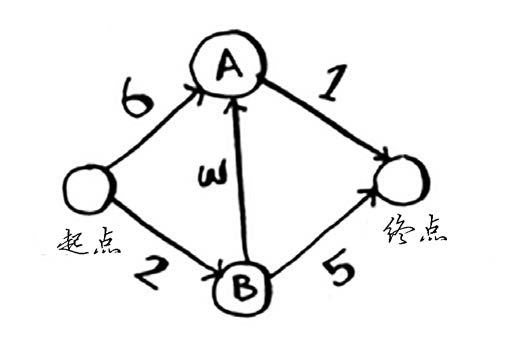
狄克斯特拉算法包含4个步骤。
(1) 找出最便宜的节点,即可在最短时间内前往的节点。
(2) 对于该节点的邻居,检查是否有前往它们的更短路径,如果有,就更新其开销。
(3) 重复这个过程,直到对图中的每个节点都这样做了。
(4) 计算最终路径。
7.2 术语
狄克斯特拉算法用于每条边都有关联数字的图,这些数字称为权重(weight)。
带权重的图称为加权图(weighted graph),不带权重的图称为非加权图(unweighted graph)。
要计算非加权图中的最短路径,可使用广度优先搜索。要计算加权图中的最短路径,可使用狄克斯特拉算法。图还可能有环。
在无向图中,每条边都是一个环。狄克斯特拉算法只适用于有向无环图(directed acyclic graph,DAG)。
7.3 换钢琴
7.4 负权边
不能将狄克斯特拉算法用于包含负权边的图。在包含负权边的图中,要找出最短路径,可使用另一种算法——贝尔曼-福德算法(Bellman-Ford algorithm)。
7.5 实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
#include <iostream>
#include <queue>
#include <utility>
#include <vector>
using namespace std;
#define INF 0x3f3f3f3f
// iPair ==> Integer Pair(整数对)
typedef pair<int, int> iPair;
// 加边
void addEdge(vector<pair<int, int>> adj[], int u, int v, int wt)
{
adj[u].push_back(make_pair(v, wt));
adj[v].push_back(make_pair(u, wt));
}
// 计算最短路
void shortestPath(vector<pair<int, int>> adj[], int V, int src)
{
// 关于stl中的优先队列如何实现,参考下方网址:
// http://geeksquiz.com/implement-min-heap-using-stl/
priority_queue<iPair, vector<iPair>, greater<iPair>> pq;
// 距离置为正无穷大
vector<int> dist(V, INF);
vector<bool> visited(V, false);
// 插入源点,距离为0
pq.push(make_pair(0, src));
dist[src] = 0;
/* 循环直到优先队列为空 */
while (!pq.empty())
{
// 每次从优先队列中取出顶点事实上是这一轮最短路径权值确定的点
int u = pq.top().second;
pq.pop();
if (visited[u])
{
continue;
}
visited[u] = true;
// 遍历所有边
for (auto x : adj[u])
{
// 得到顶点边号以及边权
int v = x.first;
int weight = x.second;
//可以松弛
if (dist[v] > dist[u] + weight)
{
// 松弛
dist[v] = dist[u] + weight;
pq.push(make_pair(dist[v], v));
}
}
}
// 打印最短路
printf("Vertex Distance from Source\n");
for (int i = 0; i < V; ++i)
printf("%d \t\t %d\n", i, dist[i]);
}
int main()
{
int V = 9;
vector<iPair> adj[V];
addEdge(adj, 0, 1, 4);
addEdge(adj, 0, 7, 8);
addEdge(adj, 1, 2, 8);
addEdge(adj, 1, 7, 11);
addEdge(adj, 2, 3, 7);
addEdge(adj, 2, 8, 2);
addEdge(adj, 2, 5, 4);
addEdge(adj, 3, 4, 9);
addEdge(adj, 3, 5, 14);
addEdge(adj, 4, 5, 10);
addEdge(adj, 5, 6, 2);
addEdge(adj, 6, 7, 1);
addEdge(adj, 6, 8, 6);
addEdge(adj, 7, 8, 7);
shortestPath(adj, V, 0);
return 0;
}
7.6 小结
- 广度优先搜索用于在非加权图中查找最短路径。
- 狄克斯特拉算法用于在加权图中查找最短路径。
- 仅当权重为正时狄克斯特拉算法才管用。
- 如果图中包含负权边,请使用贝尔曼-福德算法。
8 贪婪算法
8.1 教室调度问题
贪婪算法很简单:每步都采取最优的做法。
每步都选择局部最优解,最终得到的就是全局最优解。
8.2 背包问题
贪婪策略显然不能获得最优解,但非常接近。
8.3 集合覆盖问题
近似算法
8.4 NP 完全问题
8.4.1 旅行商问题详解
随便选择出发城市,然后每次选择要去的下一个城市时,都选择还没去的最近的城市。
8.4.2 如何识别 NP 完全问题
- 元素较少时算法的运行速度非常快,但随着元素数量的增加,速度会变得非常慢。
- 涉及“所有组合”的问题通常是NP完全问题。
- 不能将问题分成小问题,必须考虑各种可能的情况。这可能是NP完全问题。
- 如果问题涉及序列(如旅行商问题中的城市序列)且难以解决,它可能就是NP完全问题。
- 如果问题涉及集合(如广播台集合)且难以解决,它可能就是NP完全问题。
- 如果问题可转换为集合覆盖问题或旅行商问题,那它肯定是NP完全问题。
8.5 小结
- 贪婪算法寻找局部最优解,企图以这种方式获得全局最优解。
- 对于NP完全问题,还没有找到快速解决方案。
- 面临NP完全问题时,最佳的做法是使用近似算法。
- 贪婪算法易于实现、运行速度快,是不错的近似算法。
9 动态规划
9.1 背包问题
9.1.1 简单算法
尝试各种可能的商品组合,并找出价值最高的组合。$O(2^n)$
9.1.2 动态规划

9.2 背包问题 FAQ
9.3 最长公共子串
动态规划问题启示
- 动态规划可帮助你在给定约束条件下找到最优解。在背包问题中,你必须在背包容量给定的情况下,偷到价值最高的商品。
- 在问题可分解为彼此独立且离散的子问题时,就可使用动态规划来解决。
下面是一些通用的小贴士。
- 每种动态规划解决方案都涉及网格。
- 单元格中的值通常就是你要优化的值。在前面的背包问题中,单元格的值为商品的价值。
- 每个单元格都是一个子问题,因此你应考虑如何将问题分成子问题,这有助于你找出网格的坐标轴。
9.3.1 绘制网格
9.3.2 填充网格
9.3.3 揭晓答案
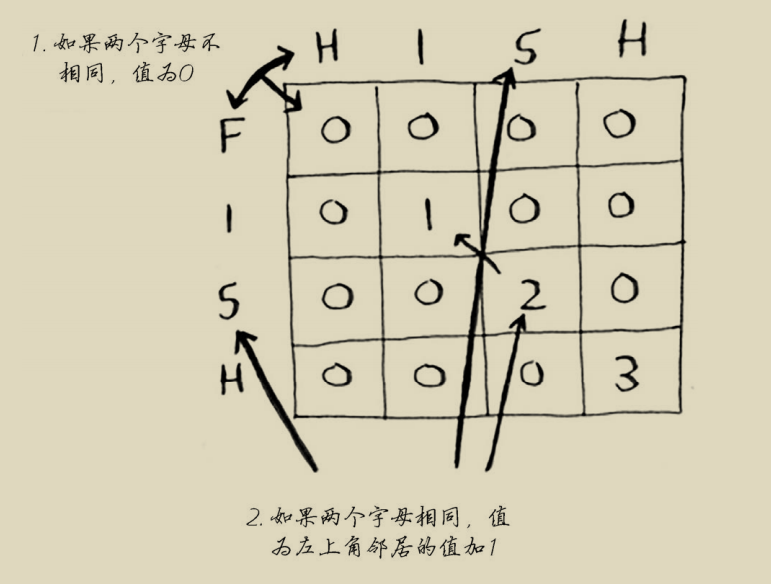
但对于最长公共子串问题,答案为网格中最大的数字——它可能并不位于最后的单元格中。
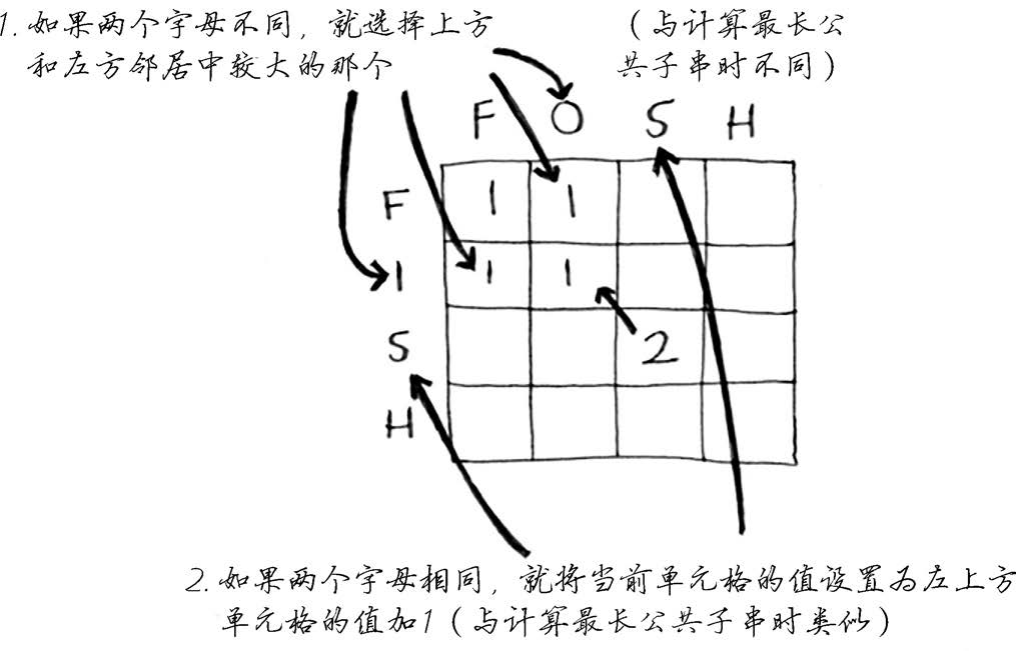
9.3.4 最长公共子序列
最长公共子序列:两个单词中都有的序列包含的字母数。
9.3.5 最长公共子序列之解决方案
9.4 小结
- 需要在给定约束条件下优化某种指标时,动态规划很有用。
- 问题可分解为离散子问题时,可使用动态规划来解决。
- 每种动态规划解决方案都涉及网格。
- 单元格中的值通常就是你要优化的值。
- 每个单元格都是一个子问题,因此你需要考虑如何将问题分解为子问题。
- 没有放之四海皆准的计算动态规划解决方案的公式。
10 K最近邻算法
10.1 橙子还是柚子
K最近邻(k-nearest neighbours,KNN)算法:如果一个样本在特征空间中的K个最相邻的样本中的大多数属于某一个类别,则该样本也属于这个类别,并具有这个类别上样本的特性。
10.2 创建推荐系统
10.2.1 特征抽取
10.2.2 回归
求K最近邻的平均值,这就是回归(regression)。使用KNN来做两项基本工作——分类和回归:
- 分类就是编组;
- 回归就是预测结果(如一个数字)。
余弦相似度(
cosine similarity)。余弦相似度不计算两个矢量的距离,而比较它们的角度。
10.2.3 挑选合适的特征
10.3 机器学习简介
10.3.1 OCR
OCR 指的是光学字符识别(optical character recognition),这意味着你可拍摄印刷页面的照片,计算机将自动识别出其中的文字。Google 使用 OCR 来实现图书数字化。
OCR 算法提取线段、点和曲线等特征。
OCR 的第一步是查看大量的数字图像并提取特征,这被称为训练(training)。
10.3.2 创建垃圾邮件过滤器
垃圾邮件过滤器使用一种简单算法——朴素贝叶斯分类器(Naive Bayes classifier)。
10.3.3 预测股票市场
未来很难预测,由于涉及的变数太多,这几乎是不可能完成的任务。
10.4 小结
KNN用于分类和回归,需要考虑最近的邻居。- 分类就是编组。
- 回归就是预测结果(如数字)。
- 特征抽取意味着将物品(如水果或用户)转换为一系列可比较的数字。
- 能否挑选合适的特征事关
KNN算法的成败。
11 接下来如何做
11.1 树
二叉查找树(binary search tree)。
二叉查找树中查找节点时,平均运行时间为 $O(log{n})$,但在最糟的情况下所需时间为 $O(n)$;
二叉查找树也存在一些缺点,例如,不能随机访问。
如果你对数据库或高级数据结构感兴趣,请研究如下数据结构:B树,红黑树,堆,伸展树。
11.2 反向索引
一个散列表,将单词映射到包含它的页面。这种数据结构被称为反向索引(inverted index),常用于创建搜索引擎。
11.3 傅里叶变换
11.4 并行算法
- 并行性管理开销。合并也是需要时间的。
- 负载均衡。子任务快慢不同。
11.5 MapReduce
有一种特殊的并行算法正越来越流行,它就是分布式算法。
在并行算法只需两到四个内核时,完全可以在笔记本电脑上运行它,但如果需要数百个内核呢?在这种情况下,可让算法在多台计算机上运行。MapReduce 是一种流行的分布式算法,你可通过流行的开源工具 Apache Hadoop 来使用它。
11.5.1 分布式算法为何很有用
分布式算法非常适合用于在短时间内完成海量工作,其中的 MapReduce 基于两个简单的理念:映射(map)函数和归并(reduce)函数。
11.5.2 映射函数
映射函数很简单,它接受一个数组,并对其中的每个元素执行同样的处理。
11.5.3 归并函数
归并函数理念是将很多项归并为一项。映射是将一个数组转换为另一个数组。
11.6 布隆过滤器和 HyperLogLog
假设你在 Google 负责搜集网页,但只想搜集新出现的网页,因此需要判断网页是否搜集过。
只是 Google 需要建立数万亿个网页的索引,因此这个散列表非常大,需要占用大量的存储空间。
11.6.1 布隆过滤器
布隆过滤器是一种概率型数据结构,它提供的答案有可能不对,但很可能是正确的。
- 可能出现错报的情况,即
Google可能指出“这个网站已搜集”,但实际上并没有搜集。 - 不可能出现漏报的情况,即如果布隆过滤器说“这个网站未搜集”,就肯定未搜集。
11.6.2 HyperLogLog
HyperLogLog 近似地计算集合中不同的元素数,与布隆过滤器一样,它不能给出准确的答案,但也八九不离十,而占用的内存空间却少得多。
面临海量数据且只要求答案八九不离十时,可考虑使用概率型算法!
11.7 SHA 算法
11.7.1 比较文件
另一种散列函数是安全散列算法(secure hash algorithm,SHA)函数。给定一个字符串,SHA 返回其散列值。
SHA 是一个散列函数,它生成一个散列值——一个较短的字符串。
11.7.2 检查密码
SHA 被广泛用于计算密码的散列值。这种散列算法是单向的。
11.8 局部敏感的散列算法
Simhash 生成的散列值也只存在细微的差别。这让你能够通过比较散列值来判断两个字符串的相似程度,这很有用!
11.9 Diffie-Hellman 密钥交换
Diffie-Hellman 算法解决了如下两个问题。
- 双方无需知道加密算法。他们不必会面协商要使用的加密算法。
- 要破解加密的消息比登天还难。
Diffie-Hellman 使用两个密钥:公钥和私钥。
Diffie-Hellman算法及其替代者RSA依然被广泛使用。如果你对加密感兴趣,先着手研究Diffie-Hellman算法是不错的选择:它既优雅又不难理解。